|
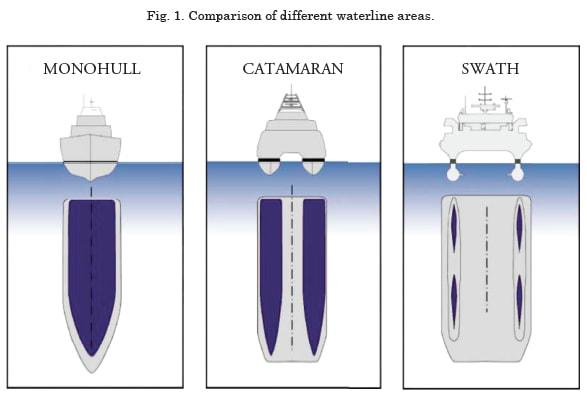
1. After much anticipation, the majority of my website has been created, although there are definitely still some things that need work. I plan on adding a page detailing the history of Mallows Bay as well as information about some of the ships present. Furthermore, I will add the "My Process" page getting to work on documenting my progress with construction of the ROV as well as learning how to use the sonar. 2. Speaking of sonar, I have begun making progress on acquiring such a system. I have contacted Oceaneering, a marine systems company that specializes in among other things ROVs and sonar. Mike Davis is one of the experts working at Oceaneering who knows more about sonar than I could ever dream of. I had planned to use a type of sonar called side-scan, however he identified a potential issue with using this at Mallows Bay, primarily the depth at which the data will be collected. Mallows Bay averages around 10 feet deep, going as shallow as only a couple feet. Side-scan is dependent on the depth of water for its swathe range. With the water being so shallow, the width of the image produced as well as the resolution of the image is reduced, therefore a different system was recommended. While side-scan sends out one or two pulses of sound in all directions, Multi-beam sonar uses an array of emitters to direct the "beam" of sound. This has the benefit of giving a much better resolution image as well as offering a potentially wider image. 3. The elephant in the room: The ROV. All this talk about sonar, but how will this sonar get to where it needs to be? While the main focus of my summer work is to obtain a functioning sonar system, I also aim to have a plan for what my ROV will look like. There are many design aspects that need to be considered when building a chassis for a sonar vessel, and without knowing what my hardware is, it is difficult to know the exact details. However, there are a few things I can hope to pin down. Primarily the shape and size of the vehicle, what sort of motors to use, and what will control it. With sonar, the hardware in only half the battle to obtain good data, the other half is stability. When the vehicle is only a few pounds, getting a good hull design is paramount. In the bottom right image you can see the different hull types. Each of the three offer different benefits. Monohull is easy to construct, however would be incredibly unstable at such a small scale. Catamaran is more stable, however is double the work to construct. Swath offers the greatest stability, being almost immune to wake with most of its buoyancy being below the waterline. However it comes with the tradeoff of being the most difficult to construct and calibrate to the right buoyancy, with any changes in weight drastically affecting the height at which it rests in the water. In conclusion: 1. Continue making a better website 2. Have a video meeting with Mike to pin down a sonar product to buy 3. Continue drafting vehicle design
1 Comment
The main focus of my project is of course the sonar. However, I have also been given a sort of "side quest" by the Mallows Bay faculty to collect other related data around the site. This includes temperature, salinity, acidity, and dissolved oxygen. After a short video call discussing the details of my project to the people at PASCO Systems, they offered to supply me with all the required sensors free of charge! Thank you PASCO! These sensors connect wirelessly via Bluetooth to my computer and enable me to collect all my data from the comfort of my kayak. They can also be configured to continuously collect data without any input from me.
|
Archives
April 2023
Categories |



 RSS Feed
RSS Feed
